Once a policy, ![]() , has been improved using
, has been improved using ![]() to yield a better
policy,
to yield a better
policy, ![]() , we can then compute
, we can then compute ![]() and improve it again to yield
an even better
and improve it again to yield
an even better ![]() . We can thus obtain a sequence of monotonically
improving policies and value functions:
. We can thus obtain a sequence of monotonically
improving policies and value functions:
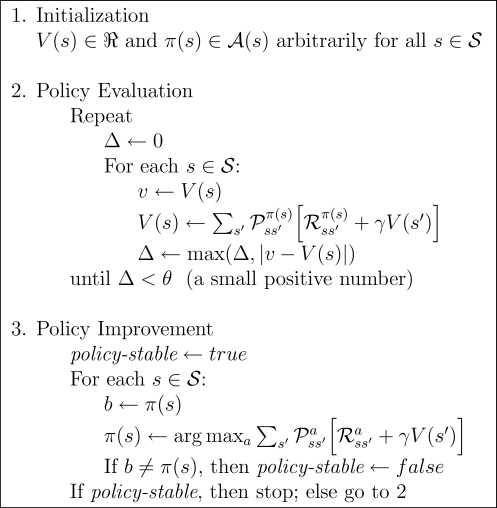
This way of finding an optimal policy is called policy iteration. A complete algorithm is given in Figure 4.3. Note that each policy evaluation, itself an iterative computation, is started with the value function for the previous policy. This typically results in a great increase in the speed of convergence of policy evaluation (presumably because the value function changes little from one policy to the next).
|
Policy iteration often converges in surprisingly few iterations. This is illustrated by the example in Figure 4.2. The bottom-left diagram shows the value function for the equiprobable random policy, and the bottom-right diagram shows a greedy policy for this value function. The policy improvement theorem assures us that these policies are better than the original random policy. In this case, however, these policies are not just better, but optimal, proceeding to the terminal states in the minimum number of steps. In this example, policy iteration would find the optimal policy after just one iteration.
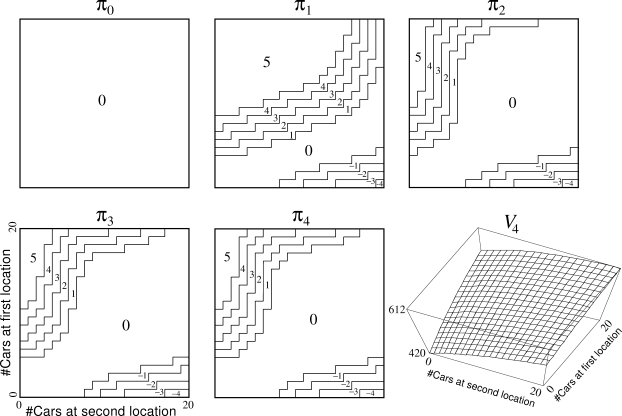
Example 4.2: Jack's Car Rental Jack manages two locations for a nationwide car rental company. Each day, some number of customers arrive at each location to rent cars. If Jack has a car available, he rents it out and is credited $10 by the national company. If he is out of cars at that location, then the business is lost. Cars become available for renting the day after they are returned. To help ensure that cars are available where they are needed, Jack can move them between the two locations overnight, at a cost of $2 per car moved. We assume that the number of cars requested and returned at each location are Poisson random variables, meaning that the probability that the number is

Exercise 4.4 (programming) Write a program for policy iteration and re-solve Jack's car rental problem with the following changes. One of Jack's employees at the first location rides a bus home each night and lives near the second location. She is happy to shuttle one car to the second location for free. Each additional car still costs $2, as do all cars moved in the other direction. In addition, Jack has limited parking space at each location. If more than 10 cars are kept overnight at a location (after any moving of cars), then an additional cost of $4 must be incurred to use a second parking lot (independent of how many cars are kept there). These sorts of nonlinearities and arbitrary dynamics often occur in real problems and cannot easily be handled by optimization methods other than dynamic programming. To check your program, first replicate the results given for the original problem. If your computer is too slow for the full problem, cut all the numbers of cars in half.
Exercise 4.5 How would policy iteration be defined for action values? Give a complete algorithm for computing
Exercise 4.6 Suppose you are restricted to considering only policies that are