In the Dyna agents presented in the preceding sections, simulated transitions are started in state-action pairs selected uniformly at random from all previously experienced pairs. But a uniform selection is usually not the best; planning can be much more efficient if simulated transitions and backups are focused on particular state-action pairs. For example, consider what happens during the second episode of the first maze task (Figure 9.6). At the beginning of the second episode, only the state-action pair leading directly into the goal has a positive value; the values of all other pairs are still zero. This means that it is pointless to back up along almost all transitions, because they take the agent from one zero-valued state to another, and thus the backups would have no effect. Only a backup along a transition into the state just prior to the goal, or from it into the goal, will change any values. If simulated transitions are generated uniformly, then many wasteful backups will be made before stumbling onto one of the two useful ones. As planning progresses, the region of useful backups grows, but planning is still far less efficient than it would be if focused where it would do the most good. In the much larger problems that are our real objective, the number of states is so large that an unfocused search would be extremely inefficient.
This example suggests that search might be usefully focused by working backward from goal states. Of course, we do not really want to use any methods specific to the idea of "goal state." We want methods that work for general reward functions. Goal states are just a special case, convenient for stimulating intuition. In general, we want to work back not just from goal states but from any state whose value has changed. Assume that the values are initially correct given the model, as they were in the maze example prior to discovering the goal. Suppose now that the agent discovers a change in the environment and changes its estimated value of one state. Typically, this will imply that the values of many other states should also be changed, but the only useful one-step backups are those of actions that lead directly into the one state whose value has already been changed. If the values of these actions are updated, then the values of the predecessor states may change in turn. If so, then actions leading into them need to be backed up, and then their predecessor states may have changed. In this way one can work backward from arbitrary states that have changed in value, either performing useful backups or terminating the propagation.
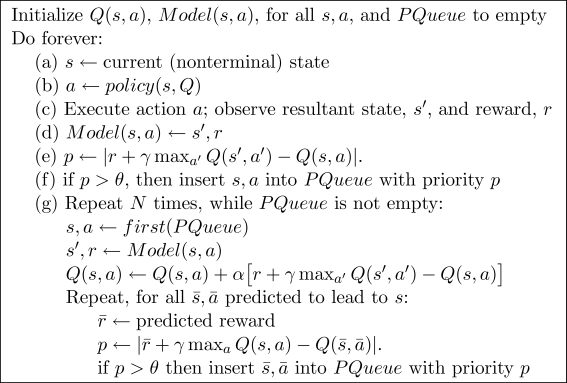
As the frontier of useful backups propagates backward, it often grows rapidly, producing many state-action pairs that could usefully be backed up. But not all of these will be equally useful. The values of some states may have changed a lot, whereas others have changed little. The predecessor pairs of those that have changed a lot are more likely to also change a lot. In a stochastic environment, variations in estimated transition probabilities also contribute to variations in the sizes of changes and in the urgency with which pairs need to be backed up. It is natural to prioritize the backups according to a measure of their urgency, and perform them in order of priority. This is the idea behind prioritized sweeping. A queue is maintained of every state-action pair whose estimated value would change nontrivially if backed up, prioritized by the size of the change. When the top pair in the queue is backed up, the effect on each of its predecessor pairs is computed. If the effect is greater than some small threshold, then the pair is inserted in the queue with the new priority (if there is a previous entry of the pair in the queue, then insertion results in only the higher priority entry's remaining in the queue). In this way the effects of changes are efficiently propagated backward until quiescence. The full algorithm for the case of deterministic environments is given in Figure 9.9.
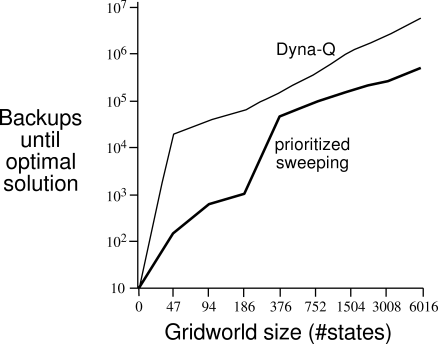
Example 9.4: Prioritized Sweeping on Mazes Prioritized sweeping has been found to dramatically increase the speed at which optimal solutions are found in maze tasks, often by a factor of 5 to 10. A typical example is shown in Figure 9.10. These data are for a sequence of maze tasks of exactly the same structure as the one shown in Figure 9.5, except that they vary in the grid resolution. Prioritized sweeping maintained a decisive advantage over unprioritized Dyna-Q. Both systems made at most

|
|
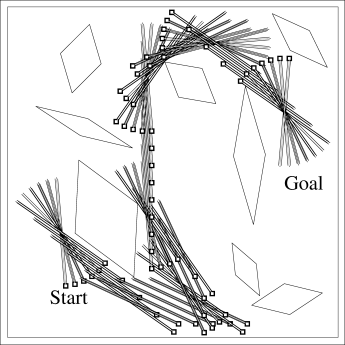
Example 9.5: Rod Maneuvering The objective in this task is to maneuver a rod around some awkwardly placed obstacles to a goal position in the fewest number of steps (Figure 9.11). The rod can be translated along its long axis or perpendicular to that axis, or it can be rotated in either direction around its center. The distance of each movement is approximately 1/20 of the work space, and the rotation increment is 10 degrees. Translations are deterministic and quantized to one of
Prioritized sweeping is clearly a powerful idea, but the algorithms that have been developed so far appear not to extend easily to more interesting cases. The greatest problem is that the algorithms appear to rely on the assumption of discrete states. When a change occurs at one state, these methods perform a computation on all the predecessor states that may have been affected. If function approximation is used to learn the model or the value function, then a single backup could influence a great many other states. It is not apparent how these states could be identified or processed efficiently. On the other hand, the general idea of focusing search on the states believed to have changed in value, and then on their predecessors, seems intuitively to be valid in general. Additional research may produce more general versions of prioritized sweeping.
Extensions of prioritized sweeping to stochastic environments are relatively straightforward. The model is maintained by keeping counts of the number of times each state-action pair has been experienced and of what the next states were. It is natural then to backup each pair not with a sample backup, as we have been using so far, but with a full backup, taking into account all possible next states and their probabilities of occurring.