One drawback to policy iteration is that each of its iterations involves
policy evaluation, which may itself be a protracted iterative computation
requiring multiple sweeps through the state set. If policy
evaluation is done iteratively, then convergence exactly to ![]() occurs only in the limit. Must we wait for exact convergence, or can we stop
short of that? The example in Figure
4.2 certainly suggests that it may be possible to truncate policy
evaluation. In that example, policy evaluation iterations beyond the first three
have no effect on the corresponding greedy policy.
occurs only in the limit. Must we wait for exact convergence, or can we stop
short of that? The example in Figure
4.2 certainly suggests that it may be possible to truncate policy
evaluation. In that example, policy evaluation iterations beyond the first three
have no effect on the corresponding greedy policy.
In fact, the policy evaluation step of policy iteration can be truncated in
several ways without losing the convergence guarantees of
policy iteration. One important special case is when policy evaluation
is stopped after just one sweep (one backup of each state). This algorithm is
called value iteration. It can be written as a particularly simple backup
operation that combines the policy improvement and truncated policy evaluation
steps:
Another way of understanding value iteration is by reference to the Bellman
optimality equation (4.1). Note that value iteration is obtained
simply by turning the Bellman optimality equation into an update rule. Also note
how the value iteration backup is identical to the policy evaluation backup
(4.5) except that it requires the maximum to be taken over all actions.
Another way of seeing this close relationship is to compare the backup diagrams
for these algorithms: Figure 3.4a
shows the backup diagram for policy evaluation and
Figure 3.7a shows the backup diagram for value iteration. These two
are the natural backup operations for computing ![]() and
and
![]() .
.
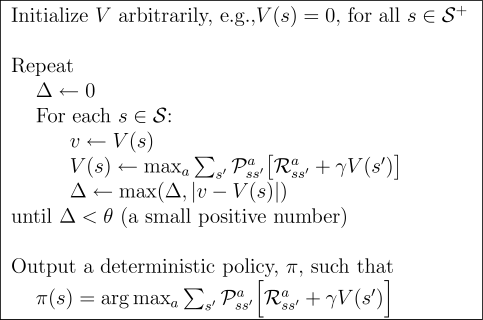
Finally, let us consider how value iteration terminates. Like policy evaluation,
value iteration formally requires an infinite number of iterations to converge
exactly to ![]() . In practice, we stop once the value function changes by only a
small amount in a sweep. Figure
4.5 gives a
complete value iteration algorithm with this kind of termination condition.
. In practice, we stop once the value function changes by only a
small amount in a sweep. Figure
4.5 gives a
complete value iteration algorithm with this kind of termination condition.
Value iteration effectively combines, in each of its sweeps, one sweep of policy evaluation and one sweep of policy improvement. Faster convergence is often achieved by interposing multiple policy evaluation sweeps between each policy improvement sweep. In general, the entire class of truncated policy iteration algorithms can be thought of as sequences of sweeps, some of which use policy evaluation backups and some of which use value iteration backups. Since the max operation in (4.10) is the only difference between these backups, this just means that the max operation is added to some sweeps of policy evaluation. All of these algorithms converge to an optimal policy for discounted finite MDPs.
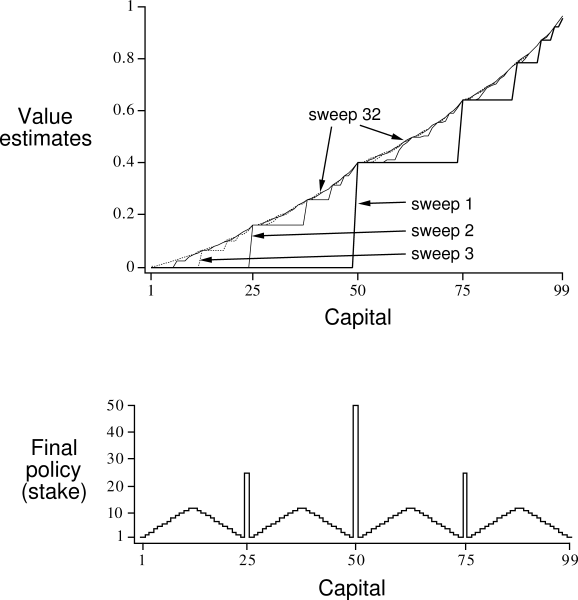
Example 4.3: Gambler's Problem A gambler has the opportunity to make bets on the outcomes of a sequence of coin flips. If the coin comes up heads, he wins as many dollars as he has staked on that flip; if it is tails, he loses his stake. The game ends when the gambler wins by reaching his goal of $100, or loses by running out of money. On each flip, the gambler must decide what portion of his capital to stake, in integer numbers of dollars. This problem can be formulated as an undiscounted, episodic, finite MDP. The state is the gambler's capital,

|
Exercise 4.7 Why does the optimal policy for the gambler's problem have such a curious form? In particular, for capital of 50 it bets it all on one flip, but for capital of 51 it does not. Why is this a good policy?
Exercise 4.8 (programming) Implement value iteration for the gambler's problem and solve it for
Exercise 4.9 What is the analog of the value iteration backup (4.10) for action values,